Lineáris altér
Mozo (vitalap | szerkesztései) (→Mátrix magtere és képtere) |
Mozo (vitalap | szerkesztései) (+kat) |
||
| (egy szerkesztő 30 közbeeső változata nincs mutatva) | |||
| 30. sor: | 30. sor: | ||
:<math>\mathrm{r}(\mathbf{v}_1,\mathbf{v}_2,...,\mathbf{v}_k)=\mathrm{dim}(\langle\mathbf{v}_1,\mathbf{v}_2,...,\mathbf{v}_k\rangle)</math> | :<math>\mathrm{r}(\mathbf{v}_1,\mathbf{v}_2,...,\mathbf{v}_k)=\mathrm{dim}(\langle\mathbf{v}_1,\mathbf{v}_2,...,\mathbf{v}_k\rangle)</math> | ||
| − | ==Mátrix magtere és képtere== | + | ===Mátrix magtere és képtere=== |
| − | Ha ''T'' test és ''M'' ∈ ''T''<sup>n× | + | Ha ''T'' test és ''M'' ∈ ''T''<sup>n×m</sup>, azaz n × m-es mártix, akkor |
:<math>\mathrm{Ker}(M)=\{\mathbf{v}\in T^n\mid M\mathbf{v}=\mathbf{0}\}</math> | :<math>\mathrm{Ker}(M)=\{\mathbf{v}\in T^n\mid M\mathbf{v}=\mathbf{0}\}</math> | ||
az ''M'' mártix '''magtere''', azaz azon elemek a ''T''<sup>n</sup> vektortérből, melyeket a mátrix a vele való szorzás által a nullába visz és | az ''M'' mártix '''magtere''', azaz azon elemek a ''T''<sup>n</sup> vektortérből, melyeket a mátrix a vele való szorzás által a nullába visz és | ||
| − | :<math>\mathrm{Im}(M)=\{M\mathbf{v}\in T^ | + | :<math>\mathrm{Im}(M)=\{M\mathbf{v}\in T^m\mid \mathbf{v}\in T^n\}</math> |
az ''M'' '''képtere''', azaz azon vektorok, melyek előállnak valamely vektor és az ''M'' mátrix szorzataként. | az ''M'' '''képtere''', azaz azon vektorok, melyek előállnak valamely vektor és az ''M'' mátrix szorzataként. | ||
| 43. sor: | 43. sor: | ||
Világos, hogy az első esetben [[Gauss-elimináció]]val kell megoldani a feldatot, a második esetben azokat az y-okat kell behatárolni, amelyre az (M|y) kibővített együtthatómátrix rangja egyezik M rangjával. | Világos, hogy az első esetben [[Gauss-elimináció]]val kell megoldani a feldatot, a második esetben azokat az y-okat kell behatárolni, amelyre az (M|y) kibővített együtthatómátrix rangja egyezik M rangjával. | ||
| + | ===Lineáris leképezés magtere és képtere=== | ||
| + | ''A'' ∈ Hom(''V'',''U''), akkor | ||
| + | :<math>\mathrm{Ker}(\mathcal{A})=\{\mathbf{v}\in V\mid \mathcal{A}\mathbf{v}=\mathbf{0}\}</math> | ||
| + | :<math>\mathrm{Im}(\mathcal{A})=\{\mathcal{A}\mathbf{v}\in U\mid \mathbf{v}\in V\}</math> | ||
| + | |||
| + | Ezekkel a fogalmakkal kapcsolatos a vektorterek [[dimenziótétel]]e. Ha ''A'' ∈ Hom(''V'',''U''), akkor | ||
| + | :<math>\mathrm{dim}\,\mathrm{Ker}(\mathcal{A})+\mathrm{dim}\,\mathrm{Im}(\mathcal{A})=\mathrm{dim}\,V</math> | ||
| + | |||
| + | ==Feladatok== | ||
| + | ===1. (altér jellemzése)=== | ||
| + | Alteret alkotnak-e? | ||
| + | * '''R'''[X]-ben, a valósegyütthatós polinomok terében a | ||
| + | **{ p | deg(p)=100 vagy p=0 } | ||
| + | **{ p | deg(p)<math>\leq</math>100 vagy p=0 } | ||
| + | **{ p | p-nek van valós gyöke } | ||
| + | * A valós számsorozatok terében a | ||
| + | **{ s | s korlátos } | ||
| + | **{ s | s konvergens } | ||
| + | **{s | s véges sok helyen nemnulla} | ||
| + | *A valós függvények terében a | ||
| + | **{ f | f periodikus } | ||
| + | **{ f | f(1) > 0 } | ||
| + | **{f | f injektív } | ||
| + | |||
| + | ===2. (generált altér)=== | ||
| + | Hány dimenziós alteret generál az alábbi vektorrendszer? Adja meg a kifeszített altér egy bázisát! | ||
| + | :<math>\begin{pmatrix}2 \\-2\\-4\end{pmatrix}</math>, <math>\begin{pmatrix}1 \\9\\3\end{pmatrix}</math>, <math>\begin{pmatrix}-2 \\-4\\1\end{pmatrix}</math>, <math>\begin{pmatrix}3 \\7\\-1\end{pmatrix}</math> | ||
| + | ====Megoldás==== | ||
| + | A vektorok az '''R'''<sup>3</sup> térbeliek, így az altér legfeljebb 3 dimenziós lehet. Ha '''A'''-val jelöljük a fenti oszlopvektorok alkotta mátrixot, akkor a feladat megoldásban (azaz egymással összefőggő vektorok keresésében) segít az | ||
| + | :'''A'''<math>\cdot</math>'''x''' = '''0''' | ||
| + | homogén lineáris egyenletrendszer megoldása. Ebből nem csak azt tudjuk majd meg, hogy lineárisan függetlenek-e (hiszen pontosan tudjuk, hogy nem azok, mert <math>\mathrm{dim}\langle A\rangle < 4</math> ), hanem hogy hány független választható ki, vagyis az '''A''' [[mátrix rangja|ragját]], r(A)-t. A-t [[Gauss-elimináció|Gauss-algoritmussal]] átalakítva: | ||
| + | :<math>\begin{bmatrix}2 & 1 & -2 & 3\\ -2 & 9 & -4 & 7 \\ -4 & 3 & 1 & -1\end{bmatrix}\sim_{\mathrm{GAlg}}\begin{bmatrix}2 & 1 & -2 & 3\\ 0 & 10 & -6 & 10 \\ 0 & 5 & -3 & 5\end{bmatrix}\sim_{\mathrm{GAlg}}</math> | ||
| + | :<math>\sim_{\mathrm{GAlg}}\begin{bmatrix}2 & 1 & -2 & 3\\ 0 & 10 & -6 & 10 \\ 0 & 0 & 0 & 0\end{bmatrix}</math> | ||
| + | A megoldás: az utolsó két változó paraméternek vehető, mondjuk ''t'' és ''s'', így kiírva az egyenletrendszert: | ||
| + | : <math>2x+y-2t+3s=0\,</math> | ||
| + | : <math>10y-6t+10s=0\,</math>, azaz <math>5y-3t+5s=0\,</math> | ||
| + | innen | ||
| + | :<math>y=\frac{3}{5}t-s</math> | ||
| + | :<math>x=\frac{1}{2}(-\frac{3}{5}t+s+2t-3s)=\frac{7}{10}t-s</math> | ||
| + | :<math>z=t\,</math> | ||
| + | :<math>v=s\,</math> | ||
| + | a megoldás. Tehát minden <math>t</math>, <math>s</math>-re fennáll: | ||
| + | :<math>(\frac{7}{10}t-s)\begin{pmatrix}2 \\-2\\-4\end{pmatrix}+(\frac{3}{5}t-s)\begin{pmatrix}1 \\9\\3\end{pmatrix}+t\begin{pmatrix}-2 \\-4\\1\end{pmatrix}+s\begin{pmatrix}3 \\7\\-1\end{pmatrix}=\begin{pmatrix}0 \\0\\0\end{pmatrix}</math> | ||
| + | Ezekből világosan látható, hogy az első két vektor ''bázis''nak választható, mert a 3. és 4. kifejezhető, rendre t=1, s=0 választással, majd t=0, s=1 választással. | ||
| + | |||
| + | Tehát: | ||
| + | :<math>\mathrm{dim}\langle A\rangle =2</math> és az altér ''egy'' bázisa: | ||
| + | : <math>B=\left\{\begin{pmatrix}2 \\-2\\-4\end{pmatrix},\begin{pmatrix}1 \\9\\3\end{pmatrix}\right\}</math> | ||
| + | |||
| + | ===3. (magtér)=== | ||
| + | Mi az | ||
| + | :<math>A=\begin{bmatrix} | ||
| + | 1 & 2 & 3 & 4\\ | ||
| + | 2 & 3 & 4 & 5 \\ | ||
| + | \end{bmatrix}</math> | ||
| + | magterének dimenziója és adja meg egy bázisát! | ||
| + | ====Megoldás.==== | ||
| + | Az '''A''' mátrix magtere praktikusan az '''A''' '''x''' = '''0''' homogén lineáris egyenletrendszer megoldásai alkotta lineáris altér, egyenletrendszeres formában: | ||
| + | :<math>\mathrm{Ker}(\mathbf{A})=\{(x,y,z,v)\in \mathbf{R}^4\mid x+2y+3z+4v=0 \quad \land \quad 2x+3y+4z+5v=0\}</math> | ||
| + | Előzetesen, próbáljuk meg a szituációt geometriailag elképzelni! A két egyenlet egy-egy hipersík az '''R'''<sup>4</sup> térben, azaz két 3 dimenziós altér. Ezek metszete a feladat, azaz egy kétdimenziós altér, azaz egy geometiai sík. Azt várjuk tehát, hogy a feladat megoldása 2 dimenziós eltér lesz. Persze, ettől még lehet hogy a feladat nem a tipikus helyzetet adja, így "vakon" csak azt mondhatjuk, hogy a keresett dimenziószám legfeljebb 4. | ||
| + | |||
| + | Gauss-eliminációhoz folyamodunk: | ||
| + | :<math>\begin{bmatrix} | ||
| + | 1 & 2 & 3 & 4\\ | ||
| + | 2 & 3 & 4 & 5 \\ | ||
| + | \end{bmatrix}\sim_\mathrm{GAlg}\begin{bmatrix} | ||
| + | 1 & 2 & 3 & 4\\ | ||
| + | 0 & -1 & -2 & -3 \\ | ||
| + | \end{bmatrix}</math> | ||
| + | Szintén két változó paramétenek vehető (v = s, z = t), így a megoldás visszafejtve: | ||
| + | :<math>x+2y+3t+4s=0\,</math> | ||
| + | :<math>-y-2t-3s=0\,</math> | ||
| + | innen | ||
| + | :<math>y=-2t-3s\,</math> | ||
| + | :<math>x=4t+6s-3t-4s=t+2s\,</math> | ||
| + | a megoldásvektor az alábbi, mely előáll a következő két vektor lineáris kombinációjaként: | ||
| + | :<math>\mathbf{x}=\begin{pmatrix} | ||
| + | t+2s\\ | ||
| + | -2t-3s\\ | ||
| + | t\\ | ||
| + | s | ||
| + | \end{pmatrix}=t\begin{pmatrix} | ||
| + | 1\\ | ||
| + | -2\\ | ||
| + | 1\\ | ||
| + | 0 | ||
| + | \end{pmatrix}+s\begin{pmatrix} | ||
| + | 2\\ | ||
| + | -3\\ | ||
| + | 0\\ | ||
| + | 1 | ||
| + | \end{pmatrix}</math> | ||
| + | Azaz a magtér a fenti két kihozott vektor által generált altér. Ezek persze nyilvánvalóan nem összefüggők az alsó két sor sztenderd bázisra utaló alakja miatt (az 1-es sehogy se jöhet ki a 0-ból). | ||
| + | |||
| + | Tehát | ||
| + | :<math>\mathrm{dim\,Ker}\,\mathbf{A}=2</math> és a magtér ''egy'' bázisa: | ||
| + | : <math>B=\left\{\begin{pmatrix} | ||
| + | 1\\ | ||
| + | -2\\ | ||
| + | 1\\ | ||
| + | 0 | ||
| + | \end{pmatrix},\begin{pmatrix} | ||
| + | 2\\ | ||
| + | -3\\ | ||
| + | 0\\ | ||
| + | 1 | ||
| + | \end{pmatrix}\right\}</math> | ||
| + | |||
| + | ===4. (képtér)=== | ||
| + | Mi az | ||
| + | :<math>\mathbf{A}=\begin{bmatrix} | ||
| + | 1 & 4 & 2\\ | ||
| + | 1 & 3 & 1\\ | ||
| + | 1 & 2 & 1\\ | ||
| + | 0 & -1& -1 | ||
| + | \end{bmatrix}</math> | ||
| + | mátrix képterének dimenziója és adja meg a képtér egy bázisát! | ||
| + | ====1. megoldás.==== | ||
| + | Világos, hogy a mátrix oszlopai elemei a képtérnek, ugyanis vannak olyan | ||
| + | :<math>\begin{pmatrix} | ||
| + | x_1\\ | ||
| + | x_2\\ | ||
| + | x_3 | ||
| + | \end{pmatrix}\in \mathbf{R}^3</math> | ||
| + | oszlopvektorok, melyek szorzata a mátrixal pontosan az oszlopvektorokat adja az (1,0,0), (0,1,0), (0,0,1) sztenderd bázis '''R'''<sup>3</sup>-ban, ezekkel rendre beszorozva a mátrixot, az oszlopokat kapjuk. A kérdés, hogy generálják-e ezek a képteret, és hogy függetlenek-e. A generátorrendszerségre nyilván igen a válasz: | ||
| + | :<math>\begin{bmatrix} | ||
| + | 1 & 4 & 2 \\ | ||
| + | 1 & 3 & 1 \\ | ||
| + | 1 & 2 & 1 \\ | ||
| + | 0 & -1& -1 | ||
| + | \end{bmatrix}\cdot \begin{pmatrix} | ||
| + | x_1 \\ | ||
| + | x_2 \\ | ||
| + | x_3 | ||
| + | \end{pmatrix}=x_1\begin{pmatrix} | ||
| + | 1 \\ | ||
| + | 1 \\ | ||
| + | 1 \\ | ||
| + | 0 | ||
| + | \end{pmatrix}+x_2\begin{pmatrix} | ||
| + | 4 \\ | ||
| + | 3 \\ | ||
| + | 2 \\ | ||
| + | -1 | ||
| + | \end{pmatrix}+x_3\begin{pmatrix} | ||
| + | 2 \\ | ||
| + | 1 \\ | ||
| + | 1 \\ | ||
| + | -1 | ||
| + | \end{pmatrix}</math> | ||
| + | Gauss-eliminációval kiderül, hogy ezek a vektorok függetlenek is, így bázist alkotnak a képtérben. | ||
| + | ====2. megoldás==== | ||
| + | Egyszerűbb kinézetű bázishoz jutunk a következő eljárással. | ||
| + | |||
| + | Azt kell megvizsgálnunk, hogy az ('''A'''|'''y''') kibővített együtthatómátrixú lineáris egynletrendszer milyen '''y'''-ra oldható meg. Az '''A'''-val való szorzás leképezése '''R'''<sup>3</sup>-ból képez '''R'''<sup>4</sup>-be. A képtér elvileg lehetne 4 dimenziós, ám a [[dimenziótétel]] szerint dim Ker A + dim Im A = dim '''R'''<sup>3</sup>, így dim Im A legfeljebb 3. Ezt várjuk. | ||
| + | |||
| + | A kibővített együtthatómátrix: | ||
| + | :<math>(\mathbf{A}|\mathbf{y})=\begin{bmatrix} | ||
| + | 1 & 4 & 2 & y_1\\ | ||
| + | 1 & 3 & 1 & y_2\\ | ||
| + | 1 & 2 & 1 & y_3\\ | ||
| + | 0 & -1& -1 & y_4 | ||
| + | \end{bmatrix}\sim_\mathrm{GAlg} | ||
| + | \begin{bmatrix} | ||
| + | 1 & 4 & 2 & y_1\\ | ||
| + | 0 & -1 & -1 & y_2-y_1\\ | ||
| + | 0 & -2 & -1 & y_3-y_1\\ | ||
| + | 0 & -1& -1 & y_4 | ||
| + | \end{bmatrix}\sim_\mathrm{GAlg}</math> | ||
| + | :<math>\sim_\mathrm{GAlg} | ||
| + | \begin{bmatrix} | ||
| + | 1 & 4 & 2 & y_1\\ | ||
| + | 0 & -1 & -1 & y_2-y_1\\ | ||
| + | 0 & 0 & 1 & y_3-y_1-(y_2-y_1)\\ | ||
| + | 0 & 0& 0 & y_4-y_2+y_1 | ||
| + | \end{bmatrix}=\begin{bmatrix} | ||
| + | 1 & 4 & 2 & y_1\\ | ||
| + | 0 & -1 & -1 & y_2-y_1\\ | ||
| + | 0 & 0 & 1 & y_3-y_2\\ | ||
| + | 0 & 0& 0 & y_4-y_2+y_1 | ||
| + | \end{bmatrix}</math> | ||
| + | ez pontosan akkor megoldható, ha teljesül az | ||
| + | :<math>y_4-y_2+y_1=0\,</math>, azaz <math>y_1-y_2+y_4=0\,</math> | ||
| + | egyenlőség (homogén lineáris egyenletrendszer) az '''y''' vektorra. Az egyenlet annak a hipersíknak az egyenlete, mely maga a képtér. Az ezt kielégítő vektorok pontosan az (1,-1,0,1) mártix magterét alkotják, így a ''egy'' bázisa a következőképpen állítható elő. y=t, z=r, v=s, <math>x=t-s\,</math> | ||
| + | :<math>\mathbf{y}=\begin{pmatrix} | ||
| + | t-s\\ | ||
| + | t\\ | ||
| + | r\\ | ||
| + | s | ||
| + | \end{pmatrix}=t\begin{pmatrix} | ||
| + | 1\\ | ||
| + | 1\\ | ||
| + | 0\\ | ||
| + | 0 | ||
| + | \end{pmatrix}+r\begin{pmatrix} | ||
| + | 0\\ | ||
| + | 0\\ | ||
| + | 1\\ | ||
| + | 0 | ||
| + | \end{pmatrix}+s\begin{pmatrix} | ||
| + | -1\\ | ||
| + | 0\\ | ||
| + | 0\\ | ||
| + | 1 | ||
| + | \end{pmatrix}</math>, tehát dim = 3 és a bázis: | ||
| + | :<math>B=\left\{\begin{pmatrix} | ||
| + | 1\\ | ||
| + | 1\\ | ||
| + | 0\\ | ||
| + | 0 | ||
| + | \end{pmatrix},\begin{pmatrix} | ||
| + | 0\\ | ||
| + | 0\\ | ||
| + | 1\\ | ||
| + | 0 | ||
| + | \end{pmatrix},\begin{pmatrix} | ||
| + | -1\\ | ||
| + | 0\\ | ||
| + | 0\\ | ||
| + | 1 | ||
| + | \end{pmatrix}\right\}</math> | ||
| + | |||
| + | [[Kategória: Lineáris algebra]] | ||
A lap jelenlegi, 2008. május 20., 13:39-kori változata
A V vektortér lineáris alterének nevezzük a W ⊆ V halmazt, ha W vektorteret alkot ugyanazokkal a műveletekkel, melyek V-nek is műveletei. Azt, hogy W altere V-nek a következőképpen jelöljük:

Tartalomjegyzék |
Altér jellemzése
Annak ellenőrzése, hogy egy vektortér részhalmaza altér egyszerűbben türténik annál, minthogy ellenőrizzük, hogy a részhalmazra teljesülnek-e a vektortéraxiómák. Altér jellemezhető a következőkkel.
Tétel - Ha (V,+,.) vektortér a T test fölött és a W ⊆ V nemüres halmaz, akkor az alábbi két kijelentés ekvivalens egymással:
- W altere V-nek
- minden u, v ∈ W-re és λ ∈ T-re:
- u + v ∈ W
- λ.v ∈ W
Tehát altér, ami zárt az összeadásra és a számmal való szorzásra.
Példák
Triviális alterek
Bármely V vektortérben maga V és a nullvektort tartalmazó {0} halmaz altér. Az előbbi dim V dimenziós, az utóbbi nulladimenziós.
Generált altér
Ha v1, v2, ... ,vk véges vektorrendszer a T test feletti V lineáris térben, akkor a

részhalmazát V-nek a { v1, v2, ... ,vk } vektorrendszer által generált altérnek vagy kifeszített altérnek nevezünk.
Ez valóban altér, hiszen bármely két elemének összege és számszorosa eleme az részhalmaznak:


Az vektorrendszer rangján éretjük, a vektorrendszer által kifesztett altér dimenzióját:

Mátrix magtere és képtere
Ha T test és M ∈ Tn×m, azaz n × m-es mártix, akkor

az M mártix magtere, azaz azon elemek a Tn vektortérből, melyeket a mátrix a vele való szorzás által a nullába visz és

az M képtere, azaz azon vektorok, melyek előállnak valamely vektor és az M mátrix szorzataként.
Praktikusan:
- Ker(M) az M együtthatómátrixú homogén lineáris egyenletrendszer megoldásainak halmaza
- Im(M) azon "jobb oldalak" halmaza az Mx=y egyenletrendszerben, melyekre az egyenletrendszer megoldható.
Világos, hogy az első esetben Gauss-eliminációval kell megoldani a feldatot, a második esetben azokat az y-okat kell behatárolni, amelyre az (M|y) kibővített együtthatómátrix rangja egyezik M rangjával.
Lineáris leképezés magtere és képtere
A ∈ Hom(V,U), akkor


Ezekkel a fogalmakkal kapcsolatos a vektorterek dimenziótétele. Ha A ∈ Hom(V,U), akkor

Feladatok
1. (altér jellemzése)
Alteret alkotnak-e?
- R[X]-ben, a valósegyütthatós polinomok terében a
- { p | deg(p)=100 vagy p=0 }
- { p | deg(p)
 100 vagy p=0 }
100 vagy p=0 }
- { p | p-nek van valós gyöke }
- A valós számsorozatok terében a
- { s | s korlátos }
- { s | s konvergens }
- {s | s véges sok helyen nemnulla}
- A valós függvények terében a
- { f | f periodikus }
- { f | f(1) > 0 }
- {f | f injektív }
2. (generált altér)
Hány dimenziós alteret generál az alábbi vektorrendszer? Adja meg a kifeszített altér egy bázisát!
 ,
,  ,
,  ,
, 
Megoldás
A vektorok az R3 térbeliek, így az altér legfeljebb 3 dimenziós lehet. Ha A-val jelöljük a fenti oszlopvektorok alkotta mátrixot, akkor a feladat megoldásban (azaz egymással összefőggő vektorok keresésében) segít az
- A
 x = 0
x = 0
homogén lineáris egyenletrendszer megoldása. Ebből nem csak azt tudjuk majd meg, hogy lineárisan függetlenek-e (hiszen pontosan tudjuk, hogy nem azok, mert  ), hanem hogy hány független választható ki, vagyis az A ragját, r(A)-t. A-t Gauss-algoritmussal átalakítva:
), hanem hogy hány független választható ki, vagyis az A ragját, r(A)-t. A-t Gauss-algoritmussal átalakítva:

A megoldás: az utolsó két változó paraméternek vehető, mondjuk t és s, így kiírva az egyenletrendszert:
-

-
 , azaz
, azaz 
innen




a megoldás. Tehát minden t, s-re fennáll:

Ezekből világosan látható, hogy az első két vektor bázisnak választható, mert a 3. és 4. kifejezhető, rendre t=1, s=0 választással, majd t=0, s=1 választással.
Tehát:
 és az altér egy bázisa:
és az altér egy bázisa:
-
3. (magtér)
Mi az
magterének dimenziója és adja meg egy bázisát!
Megoldás.
Az A mátrix magtere praktikusan az A x = 0 homogén lineáris egyenletrendszer megoldásai alkotta lineáris altér, egyenletrendszeres formában:

Előzetesen, próbáljuk meg a szituációt geometriailag elképzelni! A két egyenlet egy-egy hipersík az R4 térben, azaz két 3 dimenziós altér. Ezek metszete a feladat, azaz egy kétdimenziós altér, azaz egy geometiai sík. Azt várjuk tehát, hogy a feladat megoldása 2 dimenziós eltér lesz. Persze, ettől még lehet hogy a feladat nem a tipikus helyzetet adja, így "vakon" csak azt mondhatjuk, hogy a keresett dimenziószám legfeljebb 4.
Gauss-eliminációhoz folyamodunk:

Szintén két változó paramétenek vehető (v = s, z = t), így a megoldás visszafejtve:


innen


a megoldásvektor az alábbi, mely előáll a következő két vektor lineáris kombinációjaként:
Azaz a magtér a fenti két kihozott vektor által generált altér. Ezek persze nyilvánvalóan nem összefüggők az alsó két sor sztenderd bázisra utaló alakja miatt (az 1-es sehogy se jöhet ki a 0-ból).
Tehát
 és a magtér egy bázisa:
és a magtér egy bázisa:
-
4. (képtér)
Mi az
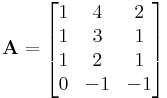
mátrix képterének dimenziója és adja meg a képtér egy bázisát!
1. megoldás.
Világos, hogy a mátrix oszlopai elemei a képtérnek, ugyanis vannak olyan
oszlopvektorok, melyek szorzata a mátrixal pontosan az oszlopvektorokat adja az (1,0,0), (0,1,0), (0,0,1) sztenderd bázis R3-ban, ezekkel rendre beszorozva a mátrixot, az oszlopokat kapjuk. A kérdés, hogy generálják-e ezek a képteret, és hogy függetlenek-e. A generátorrendszerségre nyilván igen a válasz:
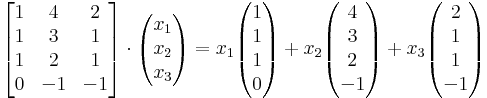
Gauss-eliminációval kiderül, hogy ezek a vektorok függetlenek is, így bázist alkotnak a képtérben.
2. megoldás
Egyszerűbb kinézetű bázishoz jutunk a következő eljárással.
Azt kell megvizsgálnunk, hogy az (A|y) kibővített együtthatómátrixú lineáris egynletrendszer milyen y-ra oldható meg. Az A-val való szorzás leképezése R3-ból képez R4-be. A képtér elvileg lehetne 4 dimenziós, ám a dimenziótétel szerint dim Ker A + dim Im A = dim R3, így dim Im A legfeljebb 3. Ezt várjuk.
A kibővített együtthatómátrix:


ez pontosan akkor megoldható, ha teljesül az
 , azaz
, azaz 
egyenlőség (homogén lineáris egyenletrendszer) az y vektorra. Az egyenlet annak a hipersíknak az egyenlete, mely maga a képtér. Az ezt kielégítő vektorok pontosan az (1,-1,0,1) mártix magterét alkotják, így a egy bázisa a következőképpen állítható elő. y=t, z=r, v=s, 
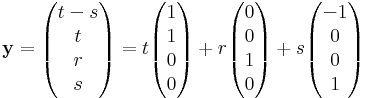 , tehát dim = 3 és a bázis:
, tehát dim = 3 és a bázis: