Matematika A1a 2008/3. gyakorlat
Mozo (vitalap | szerkesztései) (→Koordináta reprezentációk) |
Mozo (vitalap | szerkesztései) (→Egyenes és sík) |
||
| 77. sor: | 77. sor: | ||
alakban, hiszen az '''r''' - '''r'''<sub>0</sub> vektor párhuzamos az egyenessel (sőt: az egyesben van), így a '''v''' irányvektor skalárszorosa. A ''t'' jelölés az "időre" utal. Ha feltételezzük, hogy egy pont sebessége az egyenesen '''v''', akkor ''t'' azt jelenti, hogy az '''r'''<sub>0</sub>-végpontából az '''r''' végpontjába mennyi idő alatt jutunk el. | alakban, hiszen az '''r''' - '''r'''<sub>0</sub> vektor párhuzamos az egyenessel (sőt: az egyesben van), így a '''v''' irányvektor skalárszorosa. A ''t'' jelölés az "időre" utal. Ha feltételezzük, hogy egy pont sebessége az egyenesen '''v''', akkor ''t'' azt jelenti, hogy az '''r'''<sub>0</sub>-végpontából az '''r''' végpontjába mennyi idő alatt jutunk el. | ||
| − | A fenti egyenletet az ''e'' egyenes '''paraméteres vektoregyenlet'''ének nevezzük. Ha felÍrjuk | + | A fenti egyenletet az ''e'' egyenes '''paraméteres vektoregyenlet'''ének nevezzük. Ha felÍrjuk koordinátareprezentációban, akkor a |
:<math>\begin{pmatrix} | :<math>\begin{pmatrix} | ||
x \\ y\\ z | x \\ y\\ z | ||
| 87. sor: | 87. sor: | ||
x =x_0+ tv_1\\ y=y_0+ tv_2\\ z=z_0 + tv_3 | x =x_0+ tv_1\\ y=y_0+ tv_2\\ z=z_0 + tv_3 | ||
\end{matrix}\right.</math> | \end{matrix}\right.</math> | ||
| − | egyenletrendszert kapjuk, melyet az ''e'' egyenes '''paraméteres egyenletrendszer'''ének nevezünk. | + | egyenletrendszert kapjuk, melyet az ''e'' egyenes '''paraméteres egyenletrendszer'''ének nevezünk. Persze itt ['''r'''<sub>0</sub>]=(''x''<sub>0</sub>,''y''<sub>0</sub>, ''z''<sub>0</sub>), ['''r''']=(''x'',''y'', ''z'') és |
| + | ['''v''']=(''v''<sub>1</sub>,''v''<sub>2</sub>, ''v''<sub>3</sub>) | ||
| + | Ha | ||
==Házi feladatok== | ==Házi feladatok== | ||
A lap 2008. szeptember 21., 20:31-kori változata
Koordináta reprezentációk
Lineáris kombinációnak nevezzük a

alakú kifejezéseket, ahol a λ-k számok, az a-k vektorok.
Tétel.
- Ha b1 és b2 két nempárhuzamos vektor a síkban, akkor a sík minden vektora egyértelműen előáll ezek lineáris kombinációjaként:
- Ha b1, b2 és b3 három, nem egy síkban lévő vektor, akkor a tér minden vektora egyértelműen előáll ezek lineáris kombinációjaként:


Síkban két nempárhuzamos vektor halmazát, térben három nem egysíkban lévő vektor halmazát bázisnak nevezünk. Ha ezek egységhosszúságúak és páronként merőlegesen egymásra, akkor ortonormált bázist alkotnak. A jobbsodrású (v.ö.: jobbcsvarszabály) ortonormált bázis a térben az (i, j, k).
Egy v térvektornak B = (b1, b2, b3) bázisra vonatkozó koordinátareprezentációja az az oszlopmátrix, melynek elemei rendre az előző tételbeli egyértelműen létező λ-k:
![[\mathbf{v}]_B=\begin{bmatrix}\lambda_1\\ \lambda_2\\ \lambda_3
\end{bmatrix}](/upload/math/1/e/7/1e7cb0a7c3153ae8f3dfd1122069609b.png)
A vektorműveletek a koordinátareprezentációban a következők lesznek.
![[\mathbf{a}+\mathbf{b}]=\left[
\begin{matrix}
a_1+b_1\\
a_2+b_2\\
a_3+b_3
\end{matrix}
\right],\quad\quad[\lambda.\mathbf{a}]=\left[
\begin{matrix}
\lambda\cdot a_1\\
\lambda\cdot a_2\\
\lambda\cdot a_3
\end{matrix}
\right],](/upload/math/8/c/1/8c13a007ed640a0e01dd1112186b0430.png)
![\mathbf{a}\cdot\mathbf{b}=a_1b_1+a_2b_2+a_3b_3,\quad\quad[\mathbf{a}\times\mathbf{b}]=\left[
\begin{matrix}
\;\;a_2b_3-b_2a_3\\
-a_1b_3+b_1a_3\\
\;\; a_1b_2-b_1a_2
\end{matrix}
\right]](/upload/math/4/8/f/48ff379df1c0ffd1a82918295614b029.png)
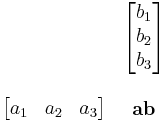
Külön fontos a vektoriális szorzat esetén megemlíteni a
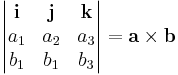
determnánssal történő kiszámolási módot és a skaláris szorzást, mint mátrixszorzást:
Egyenes és sík
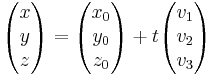
Legyen r0 az e egyenes egy pontjának helyvektora, v az irányvektora. Ekkor az egyenes bármely r pontja előáll (alkalmas t valós paraméterrel)

alakban, hiszen az r - r0 vektor párhuzamos az egyenessel (sőt: az egyesben van), így a v irányvektor skalárszorosa. A t jelölés az "időre" utal. Ha feltételezzük, hogy egy pont sebessége az egyenesen v, akkor t azt jelenti, hogy az r0-végpontából az r végpontjába mennyi idő alatt jutunk el.
A fenti egyenletet az e egyenes paraméteres vektoregyenletének nevezzük. Ha felÍrjuk koordinátareprezentációban, akkor a
 vagyis a
vagyis a 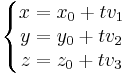
egyenletrendszert kapjuk, melyet az e egyenes paraméteres egyenletrendszerének nevezünk. Persze itt [r0]=(x0,y0, z0), [r]=(x,y, z) és [v]=(v1,v2, v3) Ha