Matematika A2a 2008/4. gyakorlat
Mozo (vitalap | szerkesztései) (→Képtér, magtér) |
Mozo (vitalap | szerkesztései) (→Képtér, magtér) |
||
| 65. sor: | 65. sor: | ||
:<math>\forall \mathbf{u}\in V_2\quad\exist \mathbf{v}\in V_1\quad\mathcal{A}\mathbf{v}=\mathbf{u}\,</math> | :<math>\forall \mathbf{u}\in V_2\quad\exist \mathbf{v}\in V_1\quad\mathcal{A}\mathbf{v}=\mathbf{u}\,</math> | ||
márpedig Im(''A'')=V<sub>2</sub> pontosan azt jelenti, hogy az érkezési halmaz minden vektora előáll képként. | márpedig Im(''A'')=V<sub>2</sub> pontosan azt jelenti, hogy az érkezési halmaz minden vektora előáll képként. | ||
| + | |||
| + | A két altér dimenziója között szoros kapcsolat van: | ||
| + | |||
| + | '''Dimenziótétel'''. Ha '''A''' : '''R'''<sup>n</sup> <math>\to</math> '''R'''<sup>m</sup> lineáris leképezés, akkor | ||
| + | :<math>\mathrm{dim}\,\mathrm{Ker}(\mathbf{A}) + \mathrm{dim}\,\mathrm{Im}(\mathbf{A}) = n</math> | ||
| + | |||
| + | ''Bizonyítás.'' Azt kell belátnunk, hogy Ker(''A'') egy bázisának száma + Im(''A'') egy bázisának száma = <math>V_1</math> egy bázisának száma. Legyen dim <math>V_1</math> = n és dim Ker(''A'') = k. Rögzítsük Ker(''A'') egy | ||
| + | :<math>B=\{b_1,...,b_k\}\,</math> | ||
| + | bázisát. Világos, hogy dim ''A''(<B>) = {0}, ezért a képtér nemnulla pontjaiba csak úgy juthatunk, ha <B>-n kívüli elemet választunk -- válasszunk annyit, mely az egész <math>V_1</math>-et generálja, egészítsük ki B-t a <math>V_1</math> egy bázisává a C halmaz hozzávételével: | ||
| + | :<math>B\cup C=\{b_1,...,b_k,c_1,...,c_l\}\,</math> | ||
| + | Ekkor a D={ ''A''c<sub>1</sub>, ''A''c<sub>2</sub>, ...,''A''c<sub>''l''</sub> } vektorrendszer bázisa lesz Im(''A'')-nak. Ugyanis | ||
| + | # D kifeszíti Im(''A'')-t. Egy | ||
| + | #:<math>u=\lambda_1b_1+\lambda_2b_2+...+\lambda_kb_k+\mu_1c_1+\mu_2c_2+...+\mu_lc_l\,</math> | ||
| + | elemmel: | ||
| + | #:<math>\mathcal{A}u=\mathcal{A}(\lambda_1b_1+\lambda_2b_2+...+\lambda_kb_k+\mu_1c_1+\mu_2c_2+...+\mu_lc_l)=\mathcal{A}(\lambda_1b_1+\lambda_2b_2+...+\lambda_kb_k)+\mathcal{A}(\mu_1c_1+\mu_2c_2+...+\mu_lc_l)=</math> | ||
| + | #:<math>=0+\mu_1.\mathcal{A}c_1+\mu_2.\mathcal{A}c_2+...+\mu_l.\mathcal{A}c_l</math> | ||
| + | # D lineárisan független. Ha ugyanis | ||
| + | :<math>\nu_1\mathcal{A}c_1+\nu_2\mathcal{A}c_2+...+\nu_l\mathcal{A}c_l=0</math> | ||
| + | akkor | ||
| + | :<math>\mathcal{A}(\nu_1.c_1+\nu_2.c_2+...+\nu_l.c_l)=0</math> | ||
| + | azaz | ||
| + | :<math>\nu_1.c_1+\nu_2.c_2+...+\nu_l.c_l\in Ker(\mathcal{A})</math> | ||
==Lineáris leképezések folytonossága== | ==Lineáris leképezések folytonossága== | ||
A lap 2009. március 5., 20:53-kori változata
- Ez az szócikk a Matematika A2a 2008 alszócikke.
Tartalomjegyzék |
Lineáris leképezések
A V1 és V2 vektorterek között ható A leképezést akkor nevezünk lineárisnak, ha teljesül minden λ, μ ∈ R és v, u ∈ V1

A definícióból rögtön következik, hogy a nulla vektor képe nulla:

viszont más elem a V2 nem feltétlenül vétetik föl.
Véges dimenziós terek közti lineáris leképezés a bázis választásával egyértelműen jellemezhető az alábbi mátrixszal.
![[\mathcal{A}]_{B,C} = \begin{bmatrix}
\begin{matrix}\vert \\ \vert \\ \mathcal{A}\mathbf{b}_1 \\ \vert \\ \vert \end{matrix}& \begin{matrix}\vert \\ \vert \\ \mathcal{A}\mathbf{b}_2 \\ \vert \\ \vert \end{matrix} & ... & \begin{matrix}\vert \\ \vert \\ \mathcal{A}\mathbf{b}_n \\ \vert \\ \vert \end{matrix}
\end{bmatrix}](/upload/math/e/2/1/e218d5327c820937af47e217f5212ec7.png)
ahol B = (b1,b2,…,bn) a V1 egy bázisa, C az V2 bázisa, a mátrix oszlopai pedig a B elemeinek  általi képvektoraiból, mint oszlopvektorokból áll. Ha V
általi képvektoraiból, mint oszlopvektorokból áll. Ha V  V típusú, akkor csak
V típusú, akkor csak ![\mbox{ }_{[\mathcal{A}]_B}](/upload/math/1/5/6/156d0043945fe751a951df3818cbfb93.png) -t szokás írni, ha pedig pusztán
-t szokás írni, ha pedig pusztán ![\mbox{ }_{[\mathcal{A}]}](/upload/math/a/b/0/ab06c27145a3fa90b92cfb08c9e0d4fe.png) -t írnak, akkor az azt jelenti, hogy a Rn sztenderd bázisáról van szó, azaz a
-t írnak, akkor az azt jelenti, hogy a Rn sztenderd bázisáról van szó, azaz a
vektorrendszerről.
Példák
1. Forgatás az origo körül φ szöggel:
![[\mathcal{F}_\varphi]=\begin{bmatrix}\cos\varphi & -\sin\varphi \\ \sin\varphi & \cos\varphi \end{bmatrix}](/upload/math/1/b/d/1bd899a86970ed93aad1b307d1af4e0b.png)
Világos, hogy ez invertálható leképezés és az inverze a -φ szögű forgatás.
2. Tükrözés a φ szőgű egyenesre.
![[\mathcal{T}_\varphi]=\begin{bmatrix}\cos(2\varphi) & \sin(2\varphi) \\ \sin(2\varphi) & -\cos(2\varphi) \end{bmatrix}](/upload/math/4/f/3/4f3d3c1c23cacad098bf0349140e0d0f.png)
Világos, hogy ez is invertálható és inverze saját maga.
Ezek ortogonális transzformációk, azaz a transzponáltjuk az inverzük. Speciálisan a tükrözés szimmetrikus leképezés, mert mátrixa szimmetrikus. Sőt, ezek alkotják a síkon az összes ortogonális transzformációt.
3. Deriváló operáció. Legyen V a legfeljebb másodfokú polinomfüggvények tere. Ekkor a

lineáris leképezés:
Bázis V-ben: {1, x, x2}, ezért a mátrixa:
![[\mathcal{D}]=
\begin{bmatrix}
0 & 1 & 0 \\
0 & 0 & 2\\
0 & 0 & 0
\end{bmatrix}](/upload/math/a/7/a/a7ad5c2aa1f95e6c92807ec3550700c1.png)
Világos, hogy a leképezés képzere nem a teljes V, hanem annak egy altere (a legfeljebb elsőfokú polinomfüggvények tere) és nem csak a 0 polinom képe 0, hanem minden konstans polinomé.
Képtér, magtér
A magtere:

Ez tényleg altér, mert ha v, u ∈ Ker(A), akkor A v=A u = 0 és

A magtér az A injektivitásával van kapcsolatban. A injektív, ha

Azaz minden v - u alakú vektorra:

de minden vektor v - u alakú, ezért ez pontosan azt jelenti, hogy Ker(A)={0} a triviális altér.
A képtere:

Ez szintén altér, mert ha vesszük két képtérbeli elem lineáris kombinációját, akkor szintén valamilyen elem képe.

Ez a szűrjektivitással van kapcsolatban. A szűrjektív, ha

márpedig Im(A)=V2 pontosan azt jelenti, hogy az érkezési halmaz minden vektora előáll képként.
A két altér dimenziója között szoros kapcsolat van:
Dimenziótétel. Ha A : Rn  Rm lineáris leképezés, akkor
Rm lineáris leképezés, akkor

Bizonyítás. Azt kell belátnunk, hogy Ker(A) egy bázisának száma + Im(A) egy bázisának száma = V1 egy bázisának száma. Legyen dim V1 = n és dim Ker(A) = k. Rögzítsük Ker(A) egy

bázisát. Világos, hogy dim A() = {0}, ezért a képtér nemnulla pontjaiba csak úgy juthatunk, ha <B>-n kívüli elemet választunk -- válasszunk annyit, mely az egész V1-et generálja, egészítsük ki B-t a V1 egy bázisává a C halmaz hozzávételével:

Ekkor a D={ Ac1, Ac2, ...,Acl } vektorrendszer bázisa lesz Im(A)-nak. Ugyanis
- D kifeszíti Im(A)-t. Egy

elemmel:
- D lineárisan független. Ha ugyanis



akkor

azaz

Lineáris leképezések folytonossága
Megjegyzés. A normált terek között ható A lineáris leképezés folytonos, ha a 0-ban folytonos.
Ugyanis, legyen az A: N1 N2 lineáris leképezés és tegyük fel, hogy 0-ban folytonos, azaz minden ε>0-ra létezik δ>0, hogy minden x ∈ Bδ(0)-ra Ax ∈ Bε(0).
Most ha ε > 0 tetszőleges és x1 és x2 N1-beliek is tetszőlegesek, akkor

amennyiben x1-x2 ∈ Bδ(0), ahol δ a 0-beli folytonosság által az ε-hoz tartozó δ.
Tétel. A : Rn Rm lineáris leképzés folytonos, sőt:

Megjegyzés. Ez azt is jelenti, hogy egy ilyen leképezés Lipschitz-függvény. Az f: Rn ⊃ Rm függvényt Lipschitz-függvénynek nevezük, ha létezik L nemnegatív szám, hogy minden x1 és x2 Dom(f)-belire:

Világos, hogy ez lineáris leképezésre ekvivalens a tételbeli megfogalmazással.
Bizonyítás. Vegyük az A szetenderd bázis beli mátrixát. Ekkor A(x)=A x. Így A minden Ai sorára
x. Így A minden Ai sorára

ahol Li rögzített i mellett a {|Ai,j|} j=1...n számok maximuma. Ha most vesszük L = max {Li}-t is, akkor

is teljesül, azaz a kép maximumnormája felülbecsülhető L-szer a vektor norma-1 szerinti normájával. A normák ekvivalenciája miat pedig alkalmas L-re minden normára igaz.
Deriváltfogalmak Rn-ben
A többdimenziós terekben több természetes általánosítására lelhetünk az egyváltozós függvények deriváltfogalmának. A következőkben konkrét esetekt nézünk.
Sebességvektor
A görbék lényegében egyváltozós vektorértékű függvények: r: I R3; t  r(t). Ezekre a deriváltat definiáló határérték válzatlan alakban írható:
r(t). Ezekre a deriváltat definiáló határérték válzatlan alakban írható:
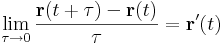
feltéve, hogy ez a határérték egyáltalán létezik az R3 normájában. A geometriai jelentésből az is következik, hogy a fenti határérték ugyanúgy a szelők határértékét, azaz az érintőt adják, mint az egyváltozós függvények esetén. Ekkor t jelentése: idő. A komponensenkénti határértékképzés miatt világos, hogy
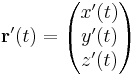
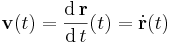
Ezt még a görbe idő szerinti paraméterezésének is nevezzük, melynek fenti deriváltja a sebességet adja és vessző helyett ponttal is jelöljük a deriváltat:
Példa.
![\mathbf{r}:[0,4\pi]\longrightarrow\mathbf{R}^3;\quad \mathbf{r}(t)=\begin{pmatrix}\cos(t)\\\sin(t)\\t\end{pmatrix}](/upload/math/1/1/4/114aa7c0e95ad98aaef1d6f051ffcc2b.png)
set size 0.5,0.5
set parametric set urange [0:4*pi] unset colorbox unset key unset xtics unset ytics unset ztics
splot cos(u),sin(u),uegy spirál paraméterezése. A deriváltja:
amiből látszik, hogy az [xy] síkra vett vetülete egy egyenletes körmozgás, a z tengelyre eső vetülete pedig egy egyenesvonalú egyenletes mozgás.
Parciális derivált
Ha adott az

kétváltozós függvény, akkor adott (x0,y0) ∈ Dom(f) pont körül ebből származtathatunk két egyváltozós függvényt:


Ezeket parciális függvényeknek nevezzük, és ha differenciálhatóak rendre az x0 és az y0 pontokban, akkor a deriváltjuk a parciális deriváltak:


Geometriailag ezek a (x0,y0) pontban állított [x,z] síkkal illetve az [yz] síkkal vett metszetgörbék, mint egyváltozós függvények deriváltjai. A parciális deriváltfüggvényeket már mint kétváltozós függvényekként definiáljuk:


Példa.
 , akkor
, akkor 
Gradiens
Ha adott az

vektorváltozós skalárfüggvény, akkor ezt általában szintfelületekkel ábrázolhatjuk. Egy (x0,y0,z0)elég kis környezetében a függvény -- ha a későbbi értelmeben differenciálható -- akkor jól közelíthető lineáris vektorváltozós skalárfüggvény, tehát valamely

függvény (x0,y0,z0) pontba való eltoltjával -- hiszen ennek az ábrázolása síkoksorokkal történik, amik a pont elég kis környzetében már a hibahatáron belül térnek el Φ-től. Ez akkor van, ha a leképezés csak elsőnél magasabbrendű tagokban különbözik a lineáristól, azaz létezik ε(r):Dom(Φ) R az r0 = (x0,y0,z0)-ban folytonos és ott 0 értéket felvevő függvény, hogy

Mindezek miatt értelmes a fenti n vektort mint a lokális viselkedés jellemzőjét, egyfajta diváltat tekinteni. n-et ekkor a Φ leképezés (x0,y0,z0) ponthoz tartozó gradiensének nevezzük és tömör definíciója a következő:

Példa

függvényt.
Ekkor a gradiensét a következőkből számítjuk ki:


ahonnan leolvasva:


mely utóbbi valóban folytonos r0-ban és értéke itt 0.
| pótló gyakorlat | 5. gyakorlat |