Szerkesztő:Mozo/A2 feladatok
Mozo (vitalap | szerkesztései) a (→Megoldás) |
(→Megoldás) |
||
| (egy szerkesztő 13 közbeeső változata nincs mutatva) | |||
| 1. sor: | 1. sor: | ||
| + | ==Gauss-elimináció-témakör== | ||
| + | ===Paraméteres egyenletrendszer=== | ||
| + | Milyen ''a'' valós paraméterre oldható meg az alábbi egyenletrendszer? | ||
| + | :<math>\begin{matrix} | ||
| + | x_1 + 2x_2 + 3x_3 & = & 2 \\ | ||
| + | x_1 + x_2 + x_3 & = & 2 \\ | ||
| + | 3x_1 + 3x_2 + ax_3 & = & 0 | ||
| + | \end{matrix}</math> | ||
| + | ====Megoldás==== | ||
| + | Az '''A'''(a)<math>\cdot</math>''x'' = ''b'' egyenletrendszer kibővített mátrixa és a [[Gauss-elimináció]] | ||
| + | :<math>[\mathbf{A}(a)|b]=\begin{bmatrix} | ||
| + | 1 & 2 & 3 & 2 \\ | ||
| + | 1 & 1 & 1 & 2 \\ | ||
| + | 3 & 3 & a & 0 | ||
| + | \end{bmatrix}\sim | ||
| + | \begin{bmatrix} | ||
| + | 1 & 2 & 3 & 2 \\ | ||
| + | 0 & -1 & -2 & 0 \\ | ||
| + | 0 & -3 & a-9 & -6 | ||
| + | \end{bmatrix}\sim | ||
| + | \begin{bmatrix} | ||
| + | 1 & 2 & 3 & 2 \\ | ||
| + | 0 & -1 & -2 & 0 \\ | ||
| + | 0 & 0 & a-3 & -6 | ||
| + | \end{bmatrix}</math> | ||
| + | Az egyenletrendszer akkor és csak akkor megoldható, ha a [[mátrix rangja]] egyenlő a kibővített mátrix rangjával. Világos, hogy | ||
| + | :r('''A'''(a)) = 3, ha ''a'' ≠ 3 és | ||
| + | :r('''A'''(a)) = 2, ha ''a'' = 3 | ||
| + | Az első esetben a <nowiki>[</nowiki>'''A'''(a)|b<nowiki>]</nowiki> csak 3 lehet (csak három sora van), míg a másodikban <nowiki>[</nowiki>'''A'''(a)|b<nowiki>]</nowiki> rangja 3, mert három független oszlopvektor választható ki belőle (pl az első, a második és a negyedik). Tehát ''a'' ≠ 3 esetén lesz megoldása az egyenletrendszernek. | ||
| + | |||
| + | '''Megjegyzés. ''' Úgy is fogalmazhatunk, hogy akkor és csak akkor van megoldás, ha az alsó sorban nem áll ellentmondás. Ez akkor van, ha az (a-3)z=-6-ból kifejezhetjük z-t, vagyis az ''a'' ≠ 3 esetén vagy ha az alsó sor 0 = 0 alakú, ami ugye nem áll. | ||
| + | ===Paraméteres mátrixrang=== | ||
| + | :''Lásd az előző feladatot!'' | ||
| + | ==Lináris leképezés sajátértéke== | ||
| + | ===Példa=== | ||
| + | Számítsuk ki az | ||
| + | :<math>\mathbf{A}=\begin{bmatrix} | ||
| + | 2 & 1 \\ | ||
| + | 2 & 1 | ||
| + | \end{bmatrix}</math> | ||
| + | mátrixú leképezés 111-edik hatványának sajátvektorait! | ||
| + | ====Megoldás==== | ||
| + | A bázisvektorok képei: (2,2) és (1,1), azaz mindkettőt az y = x egyenletű altérbe képezi az operátor. Világos, hogy ekkor a sajátaltér a μ.(1,1) alakú vektorok. | ||
| + | ===Példa=== | ||
| + | Számítsuk ki a ''x'' tengely körüli +36°-os forgatás 15-ödik és 17-edik hatványának sajátvektorait és sajátértékeit! | ||
| + | ====Megoldás==== | ||
| + | Ha '''A''' ez a lineáris operátor, akkor első hatványa a +36°-os forgatás, a második a 2<math>\cdot</math>36°-os forgatás, ..., a 15-ödik hatványa a 15<math>\cdot</math>36°=360+180=180°-os forgatás. | ||
| + | Ennek sajátvektorai az ''x'' tengely vektorai, 1 sajátértékkel., De a 17-edik hatvány is csak egy forgatás, így ennek is ugyanezek lesznek a sajátvektorai (360°-nál már más lenne a helyzet, ott minden vektor fix). | ||
| + | |||
==Függvényterek== | ==Függvényterek== | ||
| − | === | + | ===Példa=== |
Legyen ''L'' az '''R'''-en értelmezett valós függvények következő lineáris altere: | Legyen ''L'' az '''R'''-en értelmezett valós függvények következő lineáris altere: | ||
:<math>L=_{\mathrm{def}}\{A\mathrm{e}^{2x}+B\sin(3x)+C\cos(3x)\mid A,B,C\in\mathbf{R}\}</math> | :<math>L=_{\mathrm{def}}\{A\mathrm{e}^{2x}+B\sin(3x)+C\cos(3x)\mid A,B,C\in\mathbf{R}\}</math> | ||
| 22. sor: | 71. sor: | ||
Térjünk rá az operátor linearitására. A deriválás lineáris, a 4-gyel való szorzás lineáris és a leképezések összege lineáris, tehát ''A'' lineáris. Adjuk meg a mátrixot! A bázisok képei: | Térjünk rá az operátor linearitására. A deriválás lineáris, a 4-gyel való szorzás lineáris és a leképezések összege lineáris, tehát ''A'' lineáris. Adjuk meg a mátrixot! A bázisok képei: | ||
:<math>\mathcal{A}\mathrm{e}^{2x}=2\mathrm{e}^{2x}+4\mathrm{e}^{2x}=6\mathrm{e}^{2x}</math> | :<math>\mathcal{A}\mathrm{e}^{2x}=2\mathrm{e}^{2x}+4\mathrm{e}^{2x}=6\mathrm{e}^{2x}</math> | ||
| − | :<math>\mathcal{A}\mathrm{sin} | + | :<math>\mathcal{A}\mathrm{sin}(3x)=3\mathrm{cos}(3x)+4{sin}(3x)</math> |
| − | :<math>\mathcal{A}\mathrm{cos} | + | :<math>\mathcal{A}\mathrm{cos}(3x)=-3\mathrm{sin}(3x)+4{cos}(3x)</math> |
Így | Így | ||
:<math>[\mathcal{A}]=\begin{pmatrix} | :<math>[\mathcal{A}]=\begin{pmatrix} | ||
6 & 0 & 0 \\ | 6 & 0 & 0 \\ | ||
| − | 0 & | + | 0 & 4 & -3 \\ |
| − | 0 & 3 & | + | 0 & 3 & 4 |
\end{pmatrix}</math> | \end{pmatrix}</math> | ||
| − | + | ||
| + | ==Iterált határérték== | ||
| + | ===Példa=== | ||
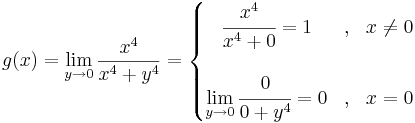
| + | :<math>\lim\limits_{x\to 0}\lim\limits_{y\to 0}\frac{x^4}{x^4+y^4}</math> | ||
| + | ====Megoldás==== | ||
| + | :<math>g(x)=\lim\limits_{y\to 0}\frac{x^4}{x^4+y^4}=\left\{\begin{matrix}\cfrac{x^4}{x^4+0}=1 &,& x\ne 0\\ | ||
| + | \\ | ||
| + | \lim\limits_{y\to 0}\cfrac{0}{0+y^4}=0 &,& x= 0 | ||
| + | \end{matrix}\right.</math> | ||
| + | :<math>\lim\limits_{x\to 0}\lim\limits_{y\to 0}\frac{x^4}{x^4+y^4}=\lim\limits_{x\to 0}g(x)=1</math> | ||
| + | ===Példa=== | ||
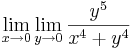
| + | :<math>\lim\limits_{x\to 0}\lim\limits_{y\to 0}\frac{y^5}{x^4+y^4}</math> | ||
| + | ====Megoldás==== | ||
| + | :<math>g(x)=\lim\limits_{y\to 0}\frac{y^5}{x^4+y^4}=\left\{\begin{matrix}\cfrac{0}{x^4+0}=0 &,& x\ne 0\\ | ||
| + | \\ | ||
| + | \lim\limits_{y\to 0}\cfrac{y^5}{0+y^4}=\lim\limits_{y\to 0}y=0 &,& x= 0 | ||
| + | \end{matrix}\right.</math> | ||
| + | Tehát g ≡ 0 | ||
| + | :<math>\lim\limits_{x\to 0}\lim\limits_{y\to 0}\frac{y^5}{x^4+y^4}=\lim\limits_{x\to 0}g(x)=0</math> | ||
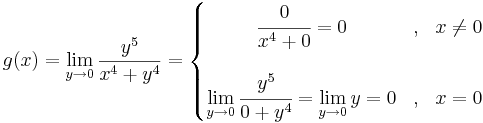
| + | ===Példa=== | ||
| + | :<math>\lim\limits_{x\to 0}\lim\limits_{y\to 0}\;x\cdot \cos\left(\textstyle{\frac{1}{y}}\right)</math> | ||
| + | ====Megoldás==== | ||
| + | :<math>g(x)=\lim\limits_{y\to 0}\;x\cdot \cos\left(\textstyle{\frac{1}{y}}\right)=\left\{\begin{matrix} \not\exists &,& x\ne 0\\ | ||
| + | \\ | ||
| + | 0 &,& x= 0 | ||
| + | \end{matrix}\right.</math> | ||
| + | Tehát g egyetlen pontból áll, éspedig a 0-nál 0. Ilyen (egypontú) függvények nincs határértéke: | ||
| + | :<math>\not\exists\lim\limits_{x\to 0}g(x)</math> | ||
| + | ===Példa=== | ||
| + | :<math>\lim\limits_{x\to 0}\lim\limits_{y\to 0}\;(x+|x|)\cdot \sin\left(\textstyle{\frac{1}{y}}\right)</math> | ||
| + | ====Megoldás==== | ||
| + | :<math>g(x)=\lim\limits_{y\to 0}\;(x+|x|)\cdot \sin\left(\textstyle{\frac{1}{y}}\right)=\left\{\begin{matrix} \not\exists\lim\limits_{y\to 0}\;2x\cdot \sin\left(\textstyle{\frac{1}{y}}\right) &,& x>0\\ | ||
| + | \\ | ||
| + | 0 &,& x\leq 0 | ||
| + | \end{matrix}\right.</math> | ||
| + | Tehát g csak a nemnegatívokon értelmezett és ott 0: | ||
| + | :<math>\lim\limits_{x\to 0}g(x)=0</math> | ||
A lap jelenlegi, 2008. június 17., 20:12-kori változata
Tartalomjegyzék |
Gauss-elimináció-témakör
Paraméteres egyenletrendszer
Milyen a valós paraméterre oldható meg az alábbi egyenletrendszer?
Megoldás
Az A(a) x = b egyenletrendszer kibővített mátrixa és a Gauss-elimináció
x = b egyenletrendszer kibővített mátrixa és a Gauss-elimináció
![[\mathbf{A}(a)|b]=\begin{bmatrix}
1 & 2 & 3 & 2 \\
1 & 1 & 1 & 2 \\
3 & 3 & a & 0
\end{bmatrix}\sim
\begin{bmatrix}
1 & 2 & 3 & 2 \\
0 & -1 & -2 & 0 \\
0 & -3 & a-9 & -6
\end{bmatrix}\sim
\begin{bmatrix}
1 & 2 & 3 & 2 \\
0 & -1 & -2 & 0 \\
0 & 0 & a-3 & -6
\end{bmatrix}](/upload/math/4/3/e/43e1d3c4eec1580b65f6e0a37bf42e54.png)
Az egyenletrendszer akkor és csak akkor megoldható, ha a mátrix rangja egyenlő a kibővített mátrix rangjával. Világos, hogy
- r(A(a)) = 3, ha a ≠ 3 és
- r(A(a)) = 2, ha a = 3
Az első esetben a [A(a)|b] csak 3 lehet (csak három sora van), míg a másodikban [A(a)|b] rangja 3, mert három független oszlopvektor választható ki belőle (pl az első, a második és a negyedik). Tehát a ≠ 3 esetén lesz megoldása az egyenletrendszernek.
Megjegyzés. Úgy is fogalmazhatunk, hogy akkor és csak akkor van megoldás, ha az alsó sorban nem áll ellentmondás. Ez akkor van, ha az (a-3)z=-6-ból kifejezhetjük z-t, vagyis az a ≠ 3 esetén vagy ha az alsó sor 0 = 0 alakú, ami ugye nem áll.
Paraméteres mátrixrang
- Lásd az előző feladatot!
Lináris leképezés sajátértéke
Példa
Számítsuk ki az
mátrixú leképezés 111-edik hatványának sajátvektorait!
Megoldás
A bázisvektorok képei: (2,2) és (1,1), azaz mindkettőt az y = x egyenletű altérbe képezi az operátor. Világos, hogy ekkor a sajátaltér a μ.(1,1) alakú vektorok.
Példa
Számítsuk ki a x tengely körüli +36°-os forgatás 15-ödik és 17-edik hatványának sajátvektorait és sajátértékeit!
Megoldás
Ha A ez a lineáris operátor, akkor első hatványa a +36°-os forgatás, a második a 236°-os forgatás, ..., a 15-ödik hatványa a 1536°=360+180=180°-os forgatás.
Ennek sajátvektorai az x tengely vektorai, 1 sajátértékkel., De a 17-edik hatvány is csak egy forgatás, így ennek is ugyanezek lesznek a sajátvektorai (360°-nál már más lenne a helyzet, ott minden vektor fix).
Függvényterek
Példa
Legyen L az R-en értelmezett valós függvények következő lineáris altere:

(azaz az exp(2.), a sin(3.) és a cos(3.) függvények által kifeszített altér.)
Adjuk meg L bázisát, igazoljuk, hogy

lineáris operátor és adjuk meg egy mátrixát!
Megoldás

boztosan generátorrendszere L-nek. Lássuk be, hogy B független. Tegyük fel ugyanis, hogy minden x valós számra

Ekkor x = 0-t véve:

illetve x = 2π-t véve is:

mely két egyenletet kivonva

azaz A = 0. Viszont ekkor C = 0-is teljesül és B csak nulla lehet, mert a szinuszfüggvény nem az azonosan nulla. Tehát a fenti egyenlőségnek csak triviális megoldása van A, B, C-ben.
Térjünk rá az operátor linearitására. A deriválás lineáris, a 4-gyel való szorzás lineáris és a leképezések összege lineáris, tehát A lineáris. Adjuk meg a mátrixot! A bázisok képei:



Így
![[\mathcal{A}]=\begin{pmatrix}
6 & 0 & 0 \\
0 & 4 & -3 \\
0 & 3 & 4
\end{pmatrix}](/upload/math/3/e/2/3e28411c5eb10bb2a88d2c7ba8c6d76c.png)
Iterált határérték
Példa
Megoldás

Példa
Megoldás
Tehát g ≡ 0

Példa
Megoldás
Tehát g egyetlen pontból áll, éspedig a 0-nál 0. Ilyen (egypontú) függvények nincs határértéke:

Példa

Megoldás

Tehát g csak a nemnegatívokon értelmezett és ott 0: