Szerkesztő:Mozo/Linalg gyakorló 3.
Mozo (vitalap | szerkesztései) (→3) |
Mozo (vitalap | szerkesztései) (→4) |
||
| 178. sor: | 178. sor: | ||
:<math>=2(c-1)(c^2+2)-6(c-1)=2(c-1)(c^2+2-3)=2(c-1)(c^2-1)=0</math> | :<math>=2(c-1)(c^2+2)-6(c-1)=2(c-1)(c^2+2-3)=2(c-1)(c^2-1)=0</math> | ||
:<math>c=\pm 1</math> | :<math>c=\pm 1</math> | ||
| + | |||
| + | ==5== | ||
| + | Legyen '''P''' az ''x'' tengelyre való vetítés, '''T''' az ''x'' tengelyre való tükrözés. Mi a '''P''', '''T''', '''P'''<sup>2</sup>, '''T'''<sup>2</sup>, '''PT''', '''TP''' leképezések kép és magtere? Igazolja, hogy | ||
| + | :<math>\mathbf{P}^2(-\mathbf{T}+\mathbf{T}^2+\mathbf{T}^3)=\mathbf{P}</math> | ||
| + | |||
| + | ''Mo.'' Csak 3 leképezésünk van: '''P'''='''P'''<sup>2</sup>='''PT'''='''TP''', '''T''' és '''I'''. Ezeknek rendre a magtere és a képtere: {(0,t)}, {(t,0)}; {0}, '''R'''<sup>2</sup>; {0}, '''R'''<sup>2</sup>. | ||
| + | |||
| + | Az azonosság igazolása: -'''T'''+'''T'''<sup>3</sup>='''0''' miatt és ez előzőek miatt nyilvánvaló. | ||
A lap 2010. március 11., 23:15-kori változata
Tartalomjegyzék |
1
Legyen L1 valódi altere az L vektortérnek (az az L1 L). Igazoljuk, hogy ekkor
L). Igazoljuk, hogy ekkor  .
.
Mo. Először is hivatkozunk arra, hogy ha F független rendszer, B bázis és G generátorrendszer, akkor  . L1 egy B bázisa lineárisan független rendszer L-ben, így
. L1 egy B bázisa lineárisan független rendszer L-ben, így  , ahol
, ahol  .
.
Most tegyük fel indirekten, hogy |B|=n. Van olyan v vektor L-ben, ami független B-től, mert ha nem lenne, akkor B generátorrendszere lenne L-nek, amiből az következne, hogy L1=L lenne. BU{v} tehát független rendszer, azaz van L-ben n+1 elemű független rendszer. De L minden független rendszere legfeljebb csak n elemű, ami ellentmondás.
2
a)



Mo.

Ax=b-nek pontosan akkor van megoldása, ha r(A)=r(A|b) (itt a r(A) az A mátrix rangja). r(A) az oszlopok által kifeszített altér dimenziója.

hisz egyrészt csak háromemeletesek, másrészt van három független (1.,2.,4. oszlop). r(A)=3 pontosan akkor, ha a≠0. Ezesetben pedig valóban 1 megoldás van, mert det(A) ≠ 0.
Megoldás: x_0+Ker(A), Ker(A)={0}, mert A invertálható:
x_0=(-1,-2,-1)
b)


Mo.
![[\mathbf{A}|\mathbf{y}]\sim\begin{bmatrix}
2 & 4 & 0 & -2\\
0 & -1 & 1 & 1\\
1 & 1 & 1 & b
\end{bmatrix}\sim\begin{bmatrix}
1 & 2 & 0 & -1\\
0 & -1 & 1 & 1\\
0 & -1 & 1 & b+1
\end{bmatrix} \sim\begin{bmatrix}
1 & 2 & 0 & -1\\
0 & -1 & 1 & 1\\
0 & 0 & 0 & b
\end{bmatrix}](/upload/math/2/d/3/2d31510649347ec9a67463a4faf92c74.png)
Megoldhatóság: b=0
Megoldások száma: végtelen, mert dimKer(A)=3-dimIm(A)=3-2=1
Megoldások: inhomogén: (-1,0,1). Ker(A)={t(-2,1,1)}
3
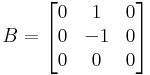
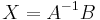
Oldjuk meg az AX=B mátrixegyenletet, ha
a)
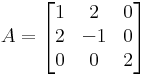 és
és
Mo. A invertálató, mert a determinánsa -2-8=-10 és ekkor a megoldás:

Az iverzet sokféleképpen lehet kiszámítani. Egyfelől az inverzmátrix képet:
itt adj A az előjeles aldeterminánsmátrix transzponáltja. Másrészt kiszámíthatjuk Gauss--Jordan-eliminációval:


Majd megszorozzuk B-vel:

b)
 és
és
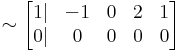
 Mo. A nem invertálható. A kibővített mátrixszal:
Mo. A nem invertálható. A kibővített mátrixszal:

A második oszlopot átvisszük paraméternek:
Ha a megoldást:  alakban írjuk föl, akkor:
alakban írjuk föl, akkor:


azaz
4
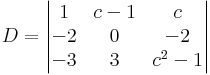
Milyen c-re nulla az alábbi determináns értéke?
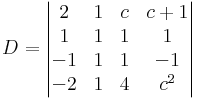 a 2. oszlop csupa 1, és a többiben is van sok egyes, tehát érdemes levonni a 2. oszlopot a többiből:
a 2. oszlop csupa 1, és a többiben is van sok egyes, tehát érdemes levonni a 2. oszlopot a többiből:
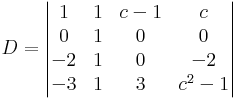 a 2. sorban egy db 1-es lett, fejtsük ki eszerint:
a 2. sorban egy db 1-es lett, fejtsük ki eszerint:
 ha levonjuk az 1. oszlopot a 3-ból, akkor eltűnik a -2:
ha levonjuk az 1. oszlopot a 3-ból, akkor eltűnik a -2:

- = 2(c − 1)(c2 + 2) − 6(c − 1) = 2(c − 1)(c2 + 2 − 3) = 2(c − 1)(c2 − 1) = 0

5
Legyen P az x tengelyre való vetítés, T az x tengelyre való tükrözés. Mi a P, T, P2, T2, PT, TP leképezések kép és magtere? Igazolja, hogy

Mo. Csak 3 leképezésünk van: P=P2=PT=TP, T és I. Ezeknek rendre a magtere és a képtere: {(0,t)}, {(t,0)}; {0}, R2; {0}, R2.
Az azonosság igazolása: -T+T3=0 miatt és ez előzőek miatt nyilvánvaló.