Matematika A2a 2008/7. gyakorlat
A MathWikiből
A lap korábbi változatát látod, amilyen Mozo (vitalap | szerkesztései) 2008. április 4., 20:05-kor történt szerkesztése után volt.
- Ez az szócikk a Matematika A2a 2008 alszócikke.
a × ... operátor
Differenciálható-e és ha igen mi a differenciálja, divergenciája, rotációja a

leképezésnek, ahol a előre megadott konstans vektor.
Megoldás
Az a × ..., azaz az

(itt I az identitás leképezés) leképezés lineáris, minthogy a vektoriális szorzás mindkét változójában lineáris (v ∈ Lin(R3;R3)), így differenciálható és differenciálja saját maga:

azaz

minden h és r ∈ R3 vektorra.
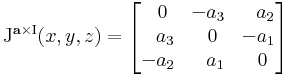
Jacobi-mátrixa (a sztenderd bázisbeli mátrixa) tetszőleges (x,y,z) pontban:
| 6. gyakorlat | 8. gyakorlat |